Iimveliso
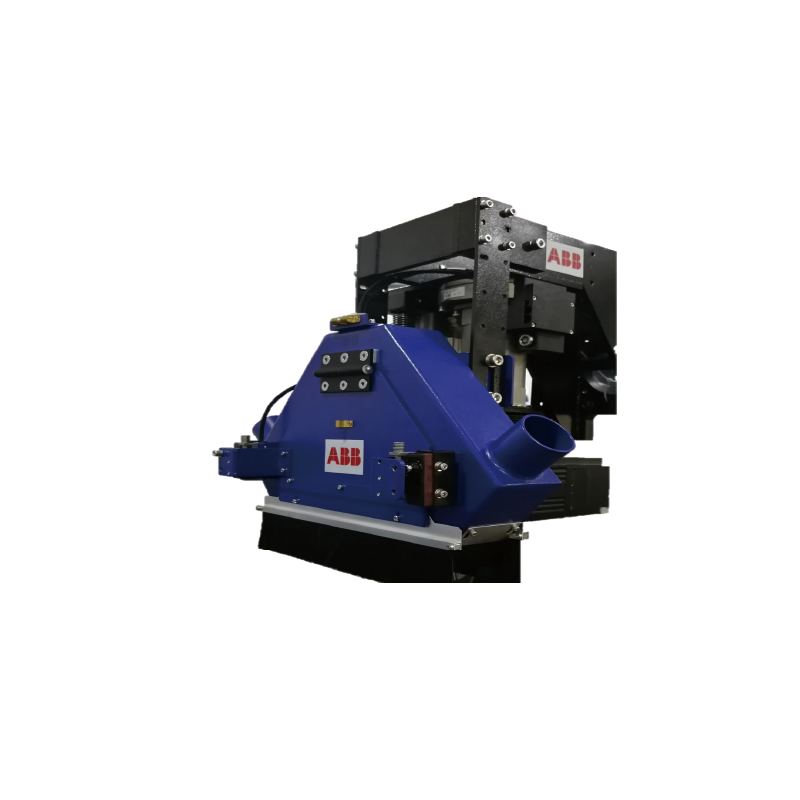
iBG01 Small Intelligent Force-controlled Belt Machine
Inkcazo
iGrinder®
I-iGrinder® Axial Floating Force Control inokudada nge-axial force engaguqukiyo kungakhathaliseki isimo sengqondo sokusila.Idibanisa i-sensor ye-force, i-sensor yokufuduka kunye ne-sensor ye-inclination yokuqonda iiparamitha ezifana namandla okusila, indawo edadayo kunye nesimo sengqondo sokugaya intloko ngexesha langempela.I-iGrinder® inenkqubo yokulawula ezimeleyo engadingi iinkqubo zangaphandle ukuba zithathe inxaxheba kulawulo.I-robot idinga kuphela ukuhamba ngokuhambelana nomzila obekwe ngaphambili, kwaye ulawulo lwamandla kunye nemisebenzi ejikelezayo igqitywe yi-iGrinder® ngokwayo.Abasebenzisi badinga kuphela ukungena kwixabiso elifunekayo lamandla, kwaye i-iGrinder® inokugcina ngokuzenzekelayo ingcinezelo yokugaya rhoqo kungakhathaliseki ukuba yintoni isimo sengqondo sokugaya i-robot.
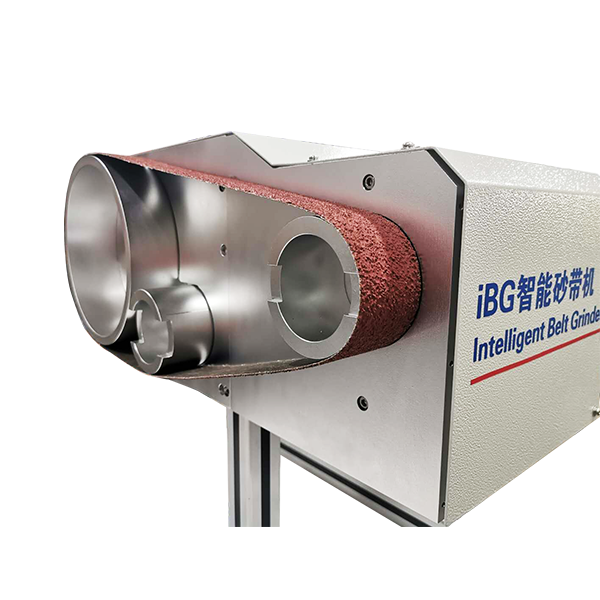
Ukutshintshela ibhanti lokuzenzekelayo
Ngokusebenzisa uyilo olukhethekileyo lwesakhiwo, ibhanti e-abrasive inokutshintshwa ngokuzenzekelayo.Ibhanti enye yesander kwiinkqubo ezininzi.
Imbuyekezo yoMxhuzulane
I-robot inokuqinisekisa ukunyanzeliswa kokugaya rhoqo xa ugaya nakweyiphi na imeko.
Imbuyekezo yoxinzelelo lwebhanti
Uxinzelelo lokugaya lulawulwa yi-iGrinder, kwaye ukunyanzeliswa kwebhanti akuchaphazeli amandla okugaya.
Ukufunyanwa kwexabiso lokugaya
Isivamvo sokufuduswa esidityanisiweyo esinokubhaqa ngokuzenzekelayo isixa sokusila.
iBG01 Small Intelligent Force-controlled Belt Machine
| Ubunzima | Uluhlu Lwenyanzelo | Ukuchaneka | Uluhlu oludadayo | Ukuchaneka koMlinganiso wokufuduswa | Belt GrindingCapability |
| 26kg | 0 - 200N | +/-1N | 0 - 25mm | 0.01mm | 2 - 3kg impahla yentsimbi |