

“ฉันกำลังมองหาที่จะซื้อโหลดเซลล์ 6 DOF และรู้สึกประทับใจกับตัวเลือกรายละเอียดต่ำของ Sunrise” ---- ผู้เชี่ยวชาญด้านการวิจัยการฟื้นฟู

แหล่งที่มาของภาพ: ห้องปฏิบัติการ neurobionics ของมหาวิทยาลัยมิชิแกน
ด้วยการเพิ่มขึ้นของปัญญาประดิษฐ์ นักวิจัยในอเมริกาเหนือและยุโรปมีความก้าวหน้าที่น่าประทับใจในการวิจัยและพัฒนาการฟื้นฟูสมรรถภาพทางการแพทย์ในหมู่พวกเขา อวัยวะเทียมอัจฉริยะ (หุ่นยนต์เทียม) ได้รับความสนใจอย่างมากหนึ่งในองค์ประกอบสำคัญของอวัยวะเทียม AI คือหน่วยควบคุมแรงขาเทียมแบบดั้งเดิมรองรับผู้ใช้ในลักษณะตายตัว ดังนั้นแขนขาและส่วนอื่นๆ ของร่างกายของผู้ใช้จึงมักจำเป็นต้องร่วมมือกับขาเทียมแบบแข็งเพื่อดำเนินการให้เสร็จสิ้นไม่เพียงแต่ความสามารถในการเคลื่อนไหวที่จำกัดเท่านั้น แต่ยังเคลื่อนไหวไม่ประสานกันอีกด้วยหกล้มได้ง่ายและเกิดภาวะแทรกซ้อนทุติยภูมิขึ้น สร้างความ ลำบากและความท้าทายให้กับผู้ป่วยมากขึ้นแตกต่างจากขาเทียมแบบดั้งเดิม ขาเทียมแบบหุ่นยนต์สามารถให้ผู้ใช้ได้รับการสนับสนุนการทรงตัวแบบแอคทีฟมากกว่าแบบพาสซีฟตามการเปลี่ยนแปลงของสภาพถนนและการเคลื่อนไหว ทำให้พวกเขาสามารถดำเนินการได้อย่างอิสระมากขึ้นและปรับปรุงคุณภาพชีวิตอย่างมาก

แหล่งที่มาของรูปภาพ: การออกแบบและการใช้งานทางคลินิกของขาไบโอนิคแบบโอเพ่นซอร์ส, Alejandro F. Azocarปริมาณวิศวกรรมชีวการแพทย์ธรรมชาติ
ตามสถิติ มีอย่างน้อย 300,000 พิการในสหรัฐอเมริกาในประเทศจีน มีผู้พิการทางร่างกาย 24.12 ล้านคน ในจำนวนนี้เป็นผู้พิการขาพิการ 2.26 ล้านคน และมีเพียง 39.8% เท่านั้นที่ติดตั้งขาเทียมสถิติในช่วงสองปีที่ผ่านมาแสดงให้เห็นว่าในประเทศจีน จำนวนการตัดแขนขาใหม่โดยเฉลี่ยต่อปีอยู่ที่ประมาณ 200,000 ราย เนื่องจากอุบัติเหตุจราจร อุบัติเหตุจากอุตสาหกรรม อุบัติเหตุจากเหมือง และโรคต่างๆจำนวนการตัดแขนขาเนื่องจากโรคเบาหวานเพิ่มขึ้นอย่างรวดเร็วแขนขาเทียมจำเป็นต้องเปลี่ยนเมื่ออายุมากขึ้นนอกจากนี้ ผู้ป่วยที่มีกล้ามเนื้ออ่อนแรง กล้ามเนื้อลีบ หรืออัมพาตครึ่งซีกยังต้องการความช่วยเหลือทางการแพทย์ เช่น โครงกระดูกภายนอกเพื่อช่วยให้ยืนหรือเคลื่อนไหวได้อีกครั้งดังนั้น ขาเทียมอัจฉริยะและโครงกระดูกภายนอกอัจฉริยะที่มีประสิทธิภาพและเชื่อถือได้มากกว่า จึงเป็นที่ต้องการของตลาดอย่างมากและมีความสำคัญทางสังคม
แหล่งที่มาของภาพ: ห้องปฏิบัติการระบบควบคุมหัวรถจักร UT Dallas
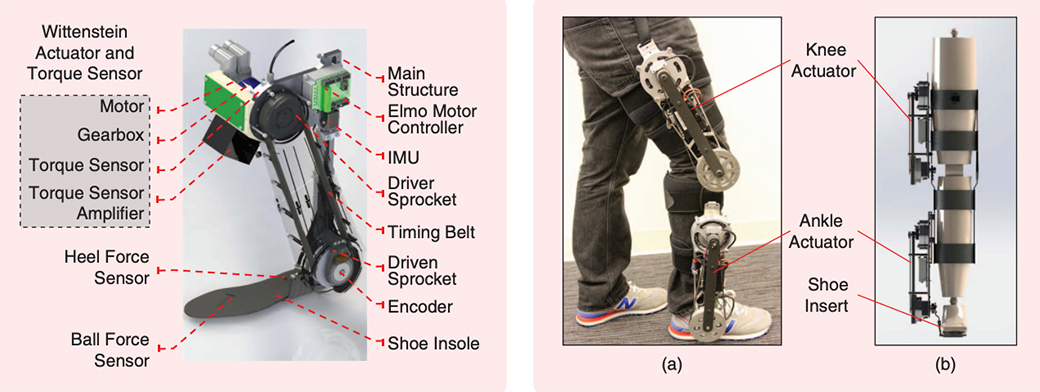
เพื่อให้เกิดการควบคุมแรงของขาเทียมอัจฉริยะ เซ็นเซอร์วัดแรง DOF 6 ตัวจำเป็นในการตรวจจับการเปลี่ยนแปลงของสภาพถนนแบบเรียลไทม์ และควบคุมขนาดของแรงได้อย่างแม่นยำความซับซ้อนของสภาพถนน ความผันแปรของการกระทำ และข้อจำกัดในการผสานทำให้ความต้องการเซ็นเซอร์ 6 DOF Force มีความต้องการสูงมากไม่เพียงแค่ต้องตอบสนองความต้องการช่วงของแรงและโมเมนต์เท่านั้น แต่ยังต้องมีน้ำหนักเบาและบางอีกด้วยผู้ใช้กล่าวว่าหลังจากการตรวจสอบ พวกเขาพบว่าในตลาดมีเพียงเซ็นเซอร์วัดแรง DOF ซีรีส์ 6 บางเฉียบ SRI M35 เท่านั้นที่สามารถตอบสนองความต้องการเหล่านี้ได้ทั้งหมด
ซีรีส์ M35 มี 18 รุ่น ซึ่งทั้งหมดมีความหนาน้อยกว่า 1 ซม. และรุ่นเล็กที่สุดมีความหนาเพียง 7.5 มม.น้ำหนักทั้งหมดน้อยกว่า 0.26 กก. และเบาที่สุดเพียง 0.01 กก.ความไม่เชิงเส้นและฮิสเทรีซิสคือ 1%, ครอสทอล์คน้อยกว่า 3% และสร้างขึ้นด้วยเทคโนโลยีสเตรนเกจที่ทำจากฟอยล์โลหะประสิทธิภาพที่ยอดเยี่ยมของเซ็นเซอร์ที่บาง เบา และกะทัดรัดเหล่านี้เกิดขึ้นได้เนื่องจากประสบการณ์การออกแบบ 30 ปีของ SRI ซึ่งมีต้นกำเนิดมาจากหุ่นจำลองความปลอดภัยในรถยนต์และขยายออกไปอีกปัจจุบันเทคโนโลยีเหล่านี้ถูกนำมาใช้ในการวิจัยและพัฒนาขาเทียมอัจฉริยะเพื่อปกป้องความปลอดภัยของผู้คนจำนวนมากขึ้น
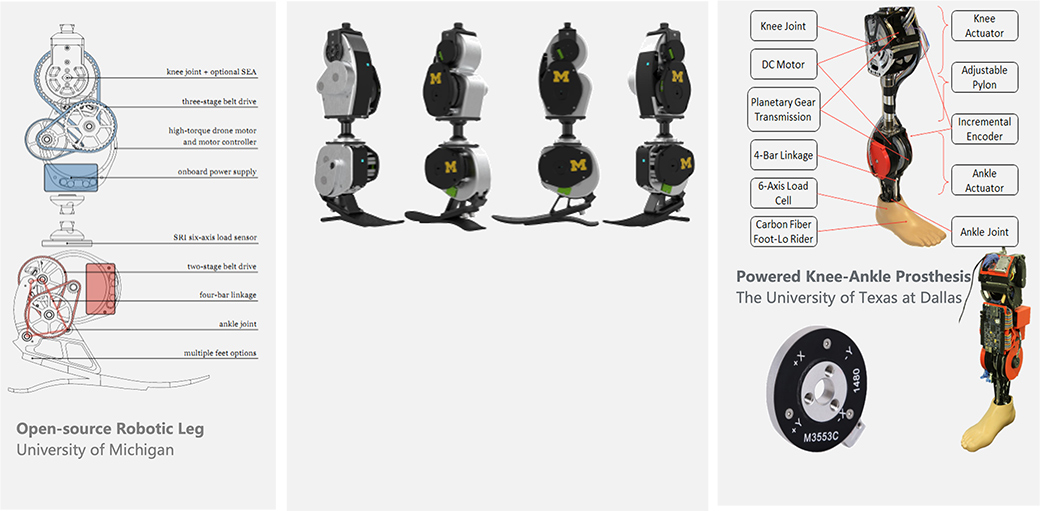
แหล่งที่มาของภาพ: ห้องปฏิบัติการ neurobionics ของมหาวิทยาลัยมิชิแกน, ห้องปฏิบัติการระบบควบคุมการเคลื่อนที่
นอกจากนี้ ราคาของเซ็นเซอร์ SRI ยังแข่งขันได้สูงเมื่อเทียบกับราคาของผู้ผลิตเซ็นเซอร์วัดแรงกดรายใหญ่รายอื่นๆด้วยความแข็งแกร่งทางเทคนิคที่แข็งแกร่งและราคาที่จับต้องได้ แบรนด์ SRI แบบเรียบง่ายจึงได้รับการบอกต่อแบบปากต่อปาก และเป็นที่ชื่นชอบอย่างมากจากห้องปฏิบัติการวิจัยการฟื้นฟูสมรรถภาพทางการแพทย์ชั้นนำและอุตสาหกรรมขาเทียมด้วยหุ่นยนต์ในช่วง 7 ปีที่ผ่านมา นักวิจัยและวิศวกรด้านไบโอนิกส์และชีวกลศาสตร์จากสหรัฐอเมริกา จีน แคนาดา ญี่ปุ่น อิตาลี สเปน และประเทศอื่นๆ ได้ใช้เซ็นเซอร์แบบบางพิเศษของ SRI สำหรับการวิจัยนวัตกรรม เผยแพร่เอกสารทางวิชาการจำนวนมาก และประสบความสำเร็จอย่างน่าทึ่ง ความคืบหน้า.
ในบทความถัดไป เราจะแนะนำการประยุกต์ใช้ SRI M35 ultra-thin series ในด้านการฟื้นฟูสมรรถภาพทางการแพทย์รวมถึงผลการวิจัยล่าสุดของอวัยวะเทียมอัจฉริยะและโครงกระดูกภายนอกอัจฉริยะที่ตีพิมพ์ในวารสารการประชุม Nature และ IEEEคอยติดตาม!
อ้างอิง:
1. ประชากรผู้ป่วยและค่าประมาณอื่น ๆ ของกายอุปกรณ์และกายอุปกรณ์ในสหรัฐอเมริกา, Maurice A. LeBlanc, MS, CP
2. การออกแบบและการใช้งานทางคลินิกของขาไบโอนิคแบบโอเพ่นซอร์ส Alejandro F. Azocarปริมาณวิศวกรรมชีวการแพทย์ธรรมชาติ
3. การออกแบบและการตรวจสอบความถูกต้องของ Orthosis ข้อเข่าและข้อเท้าที่มีแรงบิดหนาแน่นและถอยหลังได้สูงHanqi Zhu, 2017 การประชุมนานาชาติ IEEE เกี่ยวกับวิทยาการหุ่นยนต์และระบบอัตโนมัติ (ICRA)