

iGrinder® huwa għat-tħin, illustrar, u deburring.Għandu firxa wiesgħa ta 'applikazzjonijiet fil-funderija, l-ipproċessar tal-ħardwer u t-trattament tal-wiċċ mhux metalliku.iGrinder® għandu żewġ metodoloġiji tat-tħin: kontroll tal-forza floating assjali u kontroll tal-forza li jżomm f'wiċċ l-ilma.iGrinder® karatteristiċi f'veloċità ta 'rispons mgħaġġel, preċiżjoni għolja tal-kontroll tal-forza, użu konvenjenti u effiċjenza għolja tat-tħin.Meta mqabbel mal-metodu tradizzjonali ta 'kontroll tal-forza tar-robot, l-inġiniera m'għadx għandhom bżonn jagħmlu proċeduri kkumplikati ta' kontroll tas-sinjal tas-sensorju tal-forza.Ix-xogħol tat-tħin jista 'malajr jibda wara l-installazzjoni tal-iGrinder®.
Kontroll tal-Forza Floating Assjali
Kontroll tal-Forza Floating Assjali Fi ħdan il-firxa permissibbli ta 'espansjoni u kontrazzjoni assjali, iGrinder® dejjem iżomm forza ta' output assjali kostanti;Il-kontroll tal-forza li jżomm f'wiċċ l-ilma iGrinder® jintegra sensur tal-forza, sensur tal-ispostament u sensur tal-inklinazzjoni biex iħoss parametri bħal forza tat-tħin, pożizzjoni f'wiċċ l-ilma u attitudni tar-ras tat-tħin f'ħin reali.Għandha sistema ta 'kontroll indipendenti u ma teħtieġx programmi esterni biex jipparteċipaw fil-kontroll tal-forza.Pressjoni assjali kostanti tista 'tinżamm awtomatikament irrispettivament minn liema attitudni tat-tħin tkun ir-robot.
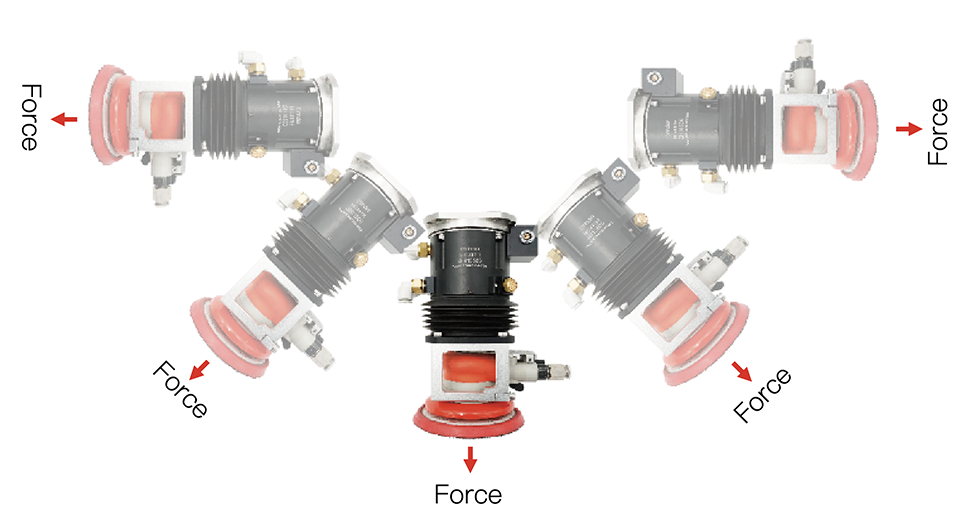
Kontroll tal-Forza Floating Radjali
Fi ħdan il-medda ta 'float radjali permissibbli, iGrinder® dejjem iżomm forza kostanti ta' output radjali;Il-forza li jżomm f'wiċċ l-ilma hija proporzjonali għall-pressjoni tal-provvista tal-arja.L-aġġustament tal-pressjoni huwa realizzat permezz ta 'valv li jirregola l-pressjoni ta' preċiżjoni jew valv proporzjonali.
