
「6自由度ロードセルの購入を検討しており、Sunriseのロープロファイルオプションに感銘を受けました。」----リハビリテーション研究の専門家

画像出典:ミシガン大学神経バイオニクス研究所
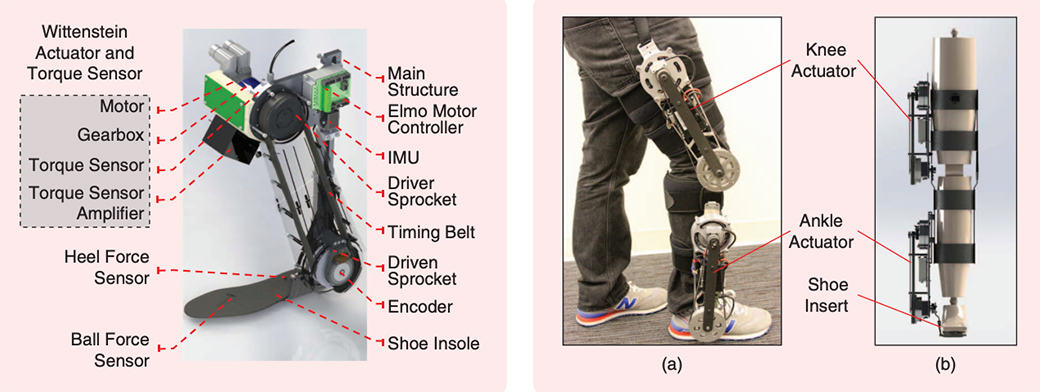
人工知能の台頭に伴い、北米と欧州の研究者は医療リハビリテーションの研究開発において目覚ましい進歩を遂げています。その中でも、人工知能義肢(ロボット義肢)は大きな注目を集めています。AI義肢の主要コンポーネントの一つは力制御ユニットです。従来の義肢はユーザーを固定的に支えるため、動作を完了するにはユーザーの他の手足や身体部位が硬い義肢と連携する必要がありました。そのため、動作能力が制限されるだけでなく、動きが不協調になり、転倒しやすく、二次的な合併症を引き起こし、患者にさらなる困難と課題をもたらしました。従来の義肢とは異なり、ロボット義肢は路面状況や動作の変化に応じて、受動的ではなく能動的なバランスサポートをユーザーに提供できるため、ユーザーはより自由に行動でき、生活の質を大幅に向上させることができます。

画像出典:オープンソースのバイオニックレッグの設計と臨床実装、Alejandro F. Azocar著。Nature Biomedical Engineering誌掲載。
統計によると、米国には少なくとも30万人の切断者がいます。中国には2,412万人の身体障害者がおり、そのうち226万人が切断者ですが、義肢を装着しているのはわずか39.8%です。過去2年間の統計によると、中国では交通事故、産業事故、鉱山事故、病気などにより、年間平均約20万人が新たに切断されています。糖尿病による切断数も急増しています。義肢も加齢とともに交換が必要です。さらに、筋力低下、筋萎縮、片麻痺の患者も、立ち上がったり動いたりするために外骨格などの医療補助具を必要としています。そのため、より効率的で信頼性の高いスマート義肢とスマート外骨格は、大きな市場需要と社会的意義を持っています。
画像出典: UTダラス運動制御システム研究室
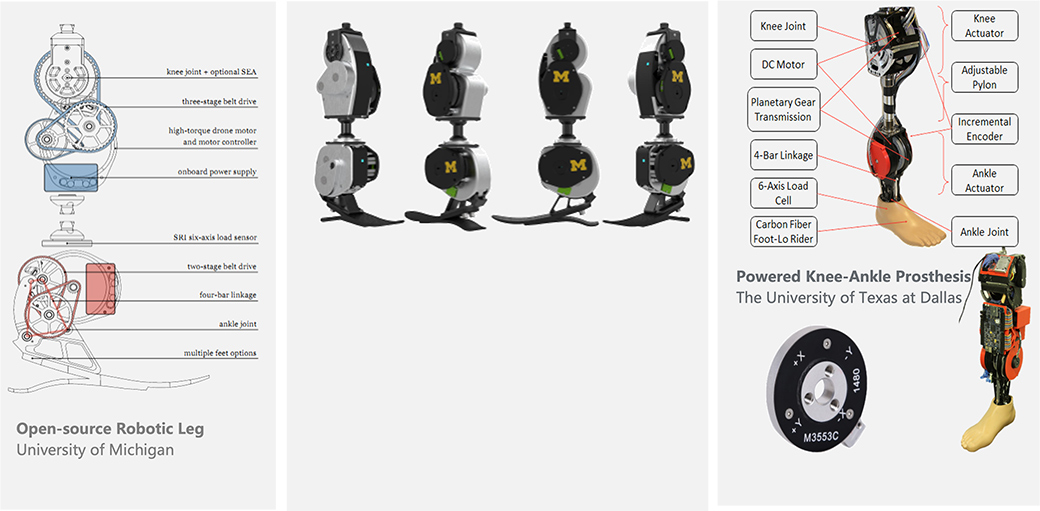
インテリジェント義肢の力制御を実現するには、路面状況の変化をリアルタイムで感知し、力の大きさを精密に制御できる6自由度力センサが必要です。路面状況の複雑さ、動作の多様性、そして統合上の制約により、6自由度力センサには非常に高い要求が課せられます。力とモーメントの範囲要件を満たすだけでなく、軽量・薄型であることも求められます。ユーザーによると、調査の結果、市場ではSRI M35超薄型シリーズ6自由度力センサだけがこれらの要件をすべて満たすことができるとのことです。
M35シリーズには18種類のモデルがあり、いずれも厚さは1cm未満、最小モデルはわずか7.5mmです。重量はすべて0.26kg未満、最軽量モデルはわずか0.01kgです。非直線性とヒステリシスは1%、クロストークは3%未満で、金属箔ひずみゲージ技術を用いて製造されています。これらの薄型、軽量、コンパクトなセンサーの優れた性能は、自動車用安全ダミー人形の開発に始まり、さらに発展してきたSRIの30年にわたる設計経験によって実現されています。これらの技術は現在、より多くの人々の安全を守るためのインテリジェント義肢の研究開発に活用されています。
画像提供:ミシガン大学神経バイオニクス研究室、運動制御システム研究室
さらに、SRIセンサーの価格は、他の大手力覚センサーメーカーの製品と比較して非常に競争力があります。高い技術力と手頃な価格設定により、控えめなSRIブランドは口コミで広がり、トップクラスの医療リハビリテーション研究機関やロボット義肢業界から深く愛されています。過去7年間、米国、中国、カナダ、日本、イタリア、スペインなど、バイオニクスおよびバイオメカニクスの研究者やエンジニアがSRIの超薄型センサーを革新的な研究に活用し、多数の学術論文を発表し、目覚ましい進歩を遂げてきました。
次の記事では、SRI M35超薄型シリーズの医療リハビリテーション分野への応用についてご紹介します。NatureやIEEEの学会誌に掲載されたインテリジェント義肢・インテリジェント外骨格の最新研究成果も併せてご紹介します。どうぞお楽しみに!
参照:
1. 米国における義肢装具の患者数およびその他の推定値、モーリス・A・ルブラン、MS、CP
2. オープンソースのバイオニックレッグの設計と臨床実装、Alejandro F. Azocar. Nature Biomedical Engineering誌第1巻。
3. トルク密度が高く、高いバックドライブ能力を持つ電動膝足首装具の設計と検証。Hanqi Zhu、2017 IEEE国際ロボティクス・オートメーション会議 (ICRA)