Kayayyaki
6 Ƙarfin Ƙarfin Ƙarfin Ƙarfin Ƙarfin Ƙarfin Ƙarfin Ƙarfin Ƙarfafawa
Na'ura mai ba da hanya tsakanin hanyoyin sadarwa na Robot
Uniaxial & Kwayoyin Load na Musamman
Ƙwayoyin Load na axis da yawa don Gwajin Dorewa ta atomatik
Ƙwayoyin Load na axis da yawa don Gwajin Crash ta atomatik
DAS don Gwajin Dorewar Mota
iGrinder®
iGrinder® Axial Floating Force-control nika
iGrinder® Radial Force-control nika
Kayan Aikin Niƙa
Kayan aiki
Aikace-aikace
Motoci
Amintaccen mota
Robotics
Likita
Gwaji Gabaɗaya
Gyaran jiki
Manufacturing
Kayan aiki da kai
Jirgin sama
Noma
Labarai
R&D
Taimako
Katalogi
Manual Sensor
Manual kayan aiki
iGrinder Manual
Software
Kulawa
FAQ
Labarai
Labaran Kamfani
Labaran Masana'antu
Game da Mu
Bayanin Kamfanin
Takaddun shaida
Tuntube Mu
Chinese
English
Aikace-aikace
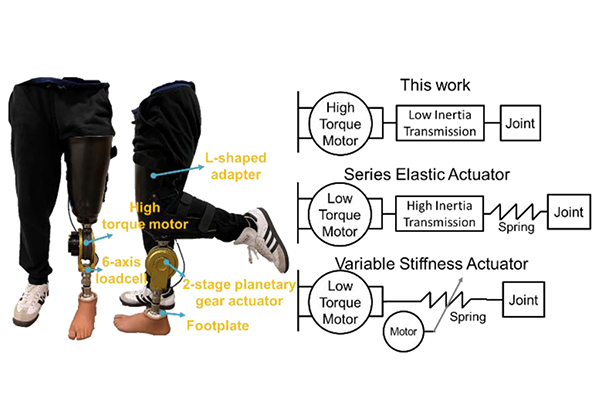
SRI 6 Axis F/T Load Cell a cikin Binciken Prosthetics
Robotic Knee Prosthesis
Biomechatronics da Lab ɗin Robotics na Hankali
Jami'ar Jihar North Carolina
Bar Saƙonku:
Ku rubuta sakonku anan ku aiko mana.
Danna shiga don bincika ko ESC don rufewa
English
French
German
Portuguese
Spanish
Russian
Japanese
Korean
Arabic
Irish
Greek
Turkish
Italian
Danish
Romanian
Indonesian
Czech
Afrikaans
Swedish
Polish
Basque
Catalan
Esperanto
Hindi
Lao
Albanian
Amharic
Armenian
Azerbaijani
Belarusian
Bengali
Bosnian
Bulgarian
Cebuano
Chichewa
Corsican
Croatian
Dutch
Estonian
Filipino
Finnish
Frisian
Galician
Georgian
Gujarati
Haitian
Hausa
Hawaiian
Hebrew
Hmong
Hungarian
Icelandic
Igbo
Javanese
Kannada
Kazakh
Khmer
Kurdish
Kyrgyz
Latin
Latvian
Lithuanian
Luxembou..
Macedonian
Malagasy
Malay
Malayalam
Maltese
Maori
Marathi
Mongolian
Burmese
Nepali
Norwegian
Pashto
Persian
Punjabi
Serbian
Sesotho
Sinhala
Slovak
Slovenian
Somali
Samoan
Scots Gaelic
Shona
Sindhi
Sundanese
Swahili
Tajik
Tamil
Telugu
Thai
Ukrainian
Urdu
Uzbek
Vietnamese
Welsh
Xhosa
Yiddish
Yoruba
Zulu
Kinyarwanda
Tatar
Oriya
Turkmen
Uyghur