

iGrinder® est destiné au meulage, au polissage et à l'ébavurage.Il a une large gamme d'applications dans la fonderie, le traitement de la quincaillerie et le traitement de surface non métallique.iGrinder® a deux méthodologies de meulage : le contrôle de la force flottante axiale et le contrôle de la force flottante radiale.iGrinder® se caractérise par une vitesse de réponse rapide, une précision de contrôle de force élevée, une utilisation pratique et une efficacité de broyage élevée.Par rapport à la méthode traditionnelle de contrôle de la force du robot, les ingénieurs n'ont plus besoin d'effectuer des procédures compliquées de contrôle du signal du capteur de force.Les travaux de meulage peuvent commencer rapidement après l'installation de l'iGrinder®.
Contrôle de la force flottante axiale
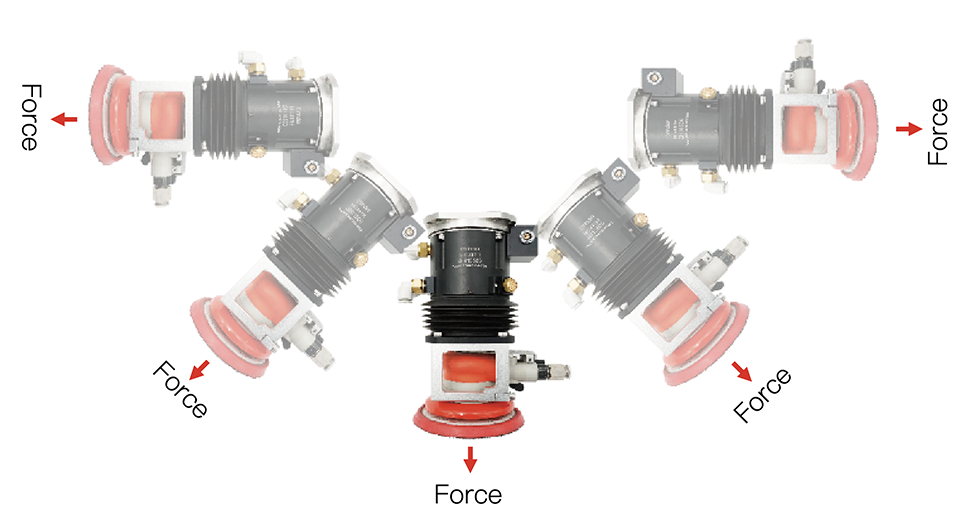
Contrôle de la force flottante axiale Dans la plage d'expansion et de contraction axiale autorisée, iGrinder® maintient toujours une force de sortie axiale constante ;Le contrôle de la force flottante axiale iGrinder® intègre un capteur de force, un capteur de déplacement et un capteur d'inclinaison pour détecter des paramètres tels que la force de meulage, la position flottante et l'attitude de la tête de meulage en temps réel.Il dispose d'un système de contrôle indépendant et ne nécessite pas de programmes externes pour participer au contrôle de la force.Une pression axiale constante peut être automatiquement maintenue quelle que soit l'attitude de meulage du robot.
Contrôle de la force flottante radiale
Dans la plage de flottement radial admissible, iGrinder® maintient toujours une force de sortie radiale constante ;La force de flottement est proportionnelle à la pression d'alimentation en air.Le réglage de la pression est réalisé par une vanne de régulation de pression de précision ou une vanne proportionnelle.
