

iGrinder® on mõeldud lihvimiseks, poleerimiseks ja jäsemete eemaldamiseks.Sellel on lai valik rakendusi valukojas, riistvara töötlemises ja mittemetallilises pinnatöötluses.iGrinder®-il on kaks lihvimismeetodit: aksiaalne ujuvjõu juhtimine ja radiaalne ujuvjõu juhtimine.iGrinder® pakub kiiret reageerimiskiirust, suure jõu juhtimise täpsust, mugavat kasutamist ja kõrget lihvimistõhusust.Võrreldes traditsioonilise roboti jõu juhtimise meetodiga ei pea insenerid enam tegema keerulisi jõuanduri signaalide juhtimisprotseduure.Lihvimistööd võivad kiiresti alata pärast iGrinder® paigaldamist.
Aksiaalse ujuva jõu juhtimine Lubatud aksiaalse laienemise ja kokkutõmbumise vahemikus säilitab iGrinder® alati konstantse aksiaalse väljundjõu;iGrinder® aksiaalne ujuvjõu juhtimine integreerib jõuanduri, nihkeanduri ja kaldeanduri, et tajuda reaalajas selliseid parameetreid nagu lihvimisjõud, ujumisasend ja lihvimispea asend.Sellel on sõltumatu kontrollisüsteem ja see ei nõua väliseid programme jõukontrollis osalemiseks.Konstantset aksiaalset rõhku saab automaatselt säilitada olenemata roboti lihvimisasendist.
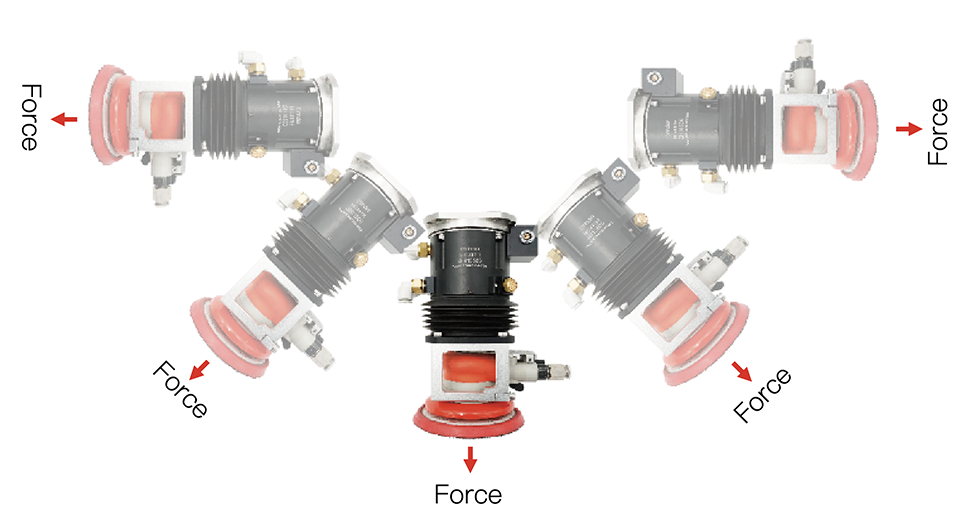
Lubatud radiaalse ujukivahemiku piires säilitab iGrinder® alati püsiva radiaalse väljundjõu;Ujuv jõud on võrdeline õhu juurdevoolu rõhuga.Rõhu reguleerimine toimub täppisrõhureguleerimisventiili või proportsionaalse klapi abil.
