

Solicitud
-
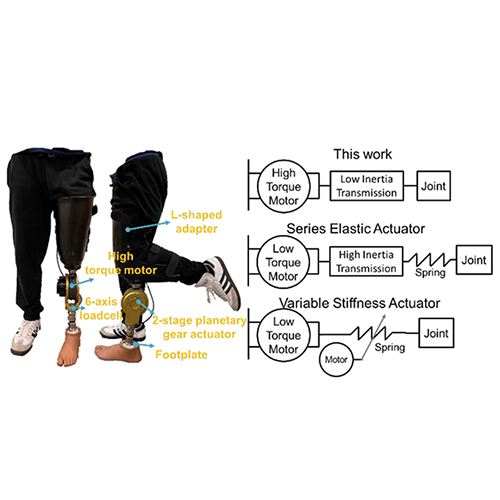
Celda de carga SRI de 6 ejes F/T en investigación de prótesis
Prótesis Robótica de Rodilla Laboratorio de Biomecatrónica y Robótica Inteligente Universidad Estatal de Carolina del NorteLee mas -

Celda de carga SRI de 6 ejes F/T en investigación de prótesis
Laboratorio de ingeniería biónica Universidad de UtahLee mas -
Celda de carga F/T de 6 ejes extradelgada SRI en prótesis
Laboratorio de sistema protésico motorizado de control locomotor de rodilla-tobillo Universidad de MichiganLee mas -

Investigación de células de carga SRI en exoesqueletos
Laboratorio de Sistemas de Control Locomotor de Exoesqueletos de Miembros Inferiores La Universidad de Texas en Dallas (UT Dallas)Lee mas -

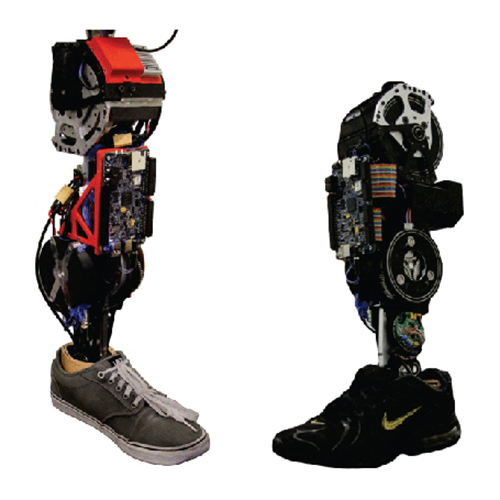
Célula de carga SRI de 6 ejes F/T en prótesis inteligentes
Pierna biónica de código abierto Laboratorio de neurobiónica de la Universidad de MichiganLee mas -

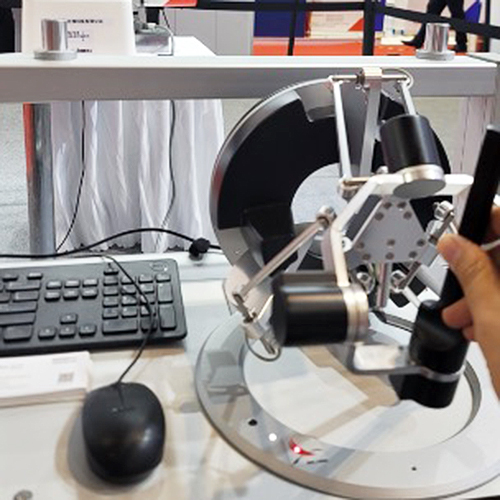
Celda de carga SRI de 6 ejes F/T en pruebas de ortodoncia
Modelo: M4312BLee mas -

Célula de carga SRI 6 Axis F/T en pruebas de análisis de marcha
Sistema de adquisición de datos y celda de carga F/T de 6 ejes personalizados por SRI para el análisis de la marcha.Lee mas -
Célula de carga F/T de 6 ejes SRI en robot teleoperado
Lee mas -

Sensor/transductor SRI en robot colaborativo
Célula de carga de fuerza/par de 6 ejes en modelo de robot colaborativo: M4313M1ALee mas








