

Mae iGrinder® ar gyfer malu, caboli a dadbwrio.Mae ganddo ystod eang o gymwysiadau mewn ffowndri, prosesu caledwedd a thriniaeth arwyneb anfetelaidd.Mae gan iGrinder® ddwy fethodoleg malu: rheolaeth grym arnofio echelinol a rheolaeth grym arnofio rheiddiol.Mae iGrinder® yn cynnwys cyflymder ymateb cyflym, cywirdeb rheoli grym uchel, defnydd cyfleus ac effeithlonrwydd malu uchel.O'i gymharu â'r dull rheoli grym robot traddodiadol, nid oes angen i beirianwyr bellach wneud gweithdrefnau rheoli signal synhwyrydd grym cymhleth.Gall gwaith malu ddechrau'n gyflym ar ôl gosod yr iGrinder®.
Rheolaeth Grym arnofio Echelinol O fewn yr ystod ehangu a chrebachu echelinol a ganiateir, mae iGrinder® bob amser yn cynnal grym allbwn echelinol cyson;Mae rheolaeth grym echelinol arnawf iGrinder® yn integreiddio synhwyrydd grym, synhwyrydd dadleoli a synhwyrydd gogwydd i synhwyro paramedrau megis grym malu, safle arnofio ac agwedd pen malu mewn amser real.Mae ganddo system reoli annibynnol ac nid oes angen rhaglenni allanol i gymryd rhan yn rheolaeth yr heddlu.Gellir cynnal pwysau echelinol cyson yn awtomatig ni waeth beth yw agwedd malu y robot.
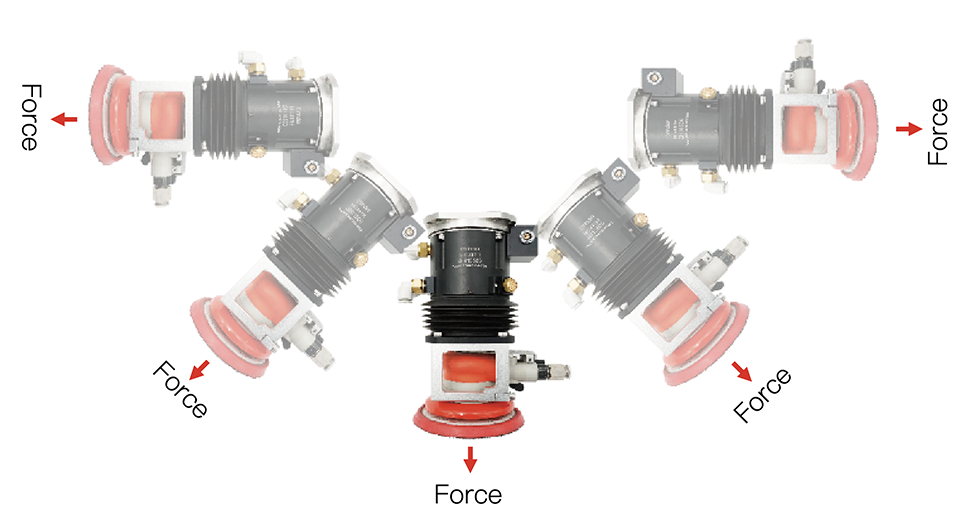
Rheolaeth Grym Symudol Rheiddiol
O fewn yr ystod arnofio rheiddiol a ganiateir, mae iGrinder® bob amser yn cynnal grym allbwn rheiddiol cyson;Mae'r grym arnofio yn gymesur â'r pwysau cyflenwad aer.Gwireddir yr addasiad pwysau gan falf rheoleiddio pwysau manwl gywir neu falf gyfrannol.
