Cynhyrchion
iBG01 Peiriant Gwregys Bach a Reolir gan Llu Deallus
Disgrifiad
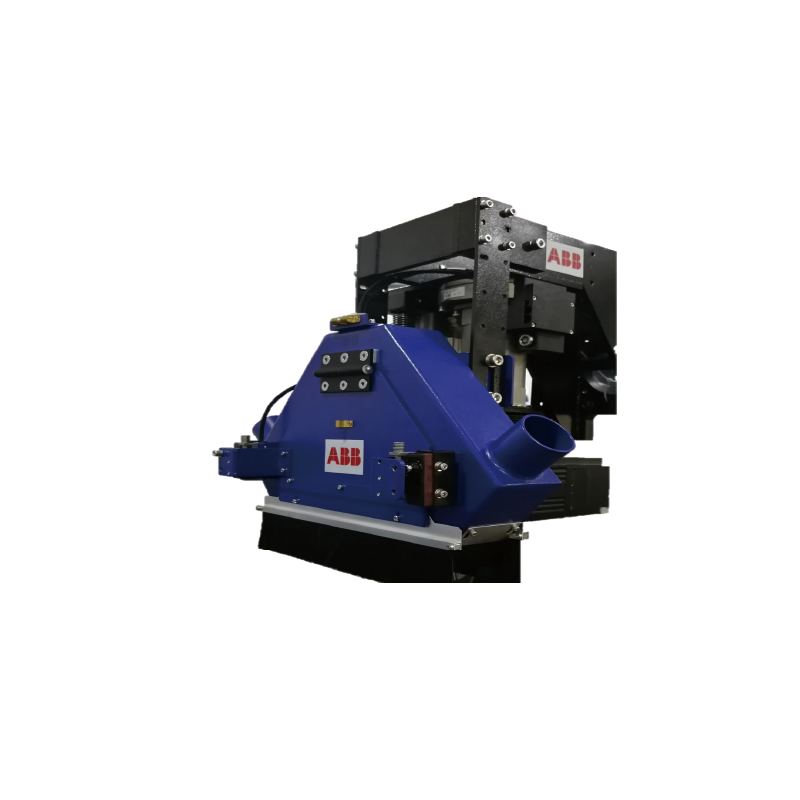
iGrinder®
Gall y iGrinder ® Axial floating Force Control arnofio gyda grym echelinol cyson waeth beth fo agwedd malu pen.Mae'n integreiddio synhwyrydd grym, synhwyrydd dadleoli a synhwyrydd tueddiad i synhwyro paramedrau megis grym malu, safle arnofio ac agwedd pen malu mewn amser real.Mae gan iGrinder® system reoli annibynnol nad oes angen rhaglenni allanol i gymryd rhan mewn rheolaeth.Dim ond yn ôl y trac a osodwyd ymlaen llaw y mae angen i'r robot symud, ac mae'r iGrinder® ei hun yn cwblhau'r swyddogaethau rheoli grym a symudol.Dim ond y gwerth grym gofynnol y mae angen i ddefnyddwyr ei nodi, a gall yr iGrinder® gynnal pwysau malu cyson yn awtomatig ni waeth pa agwedd malu yw'r robot.
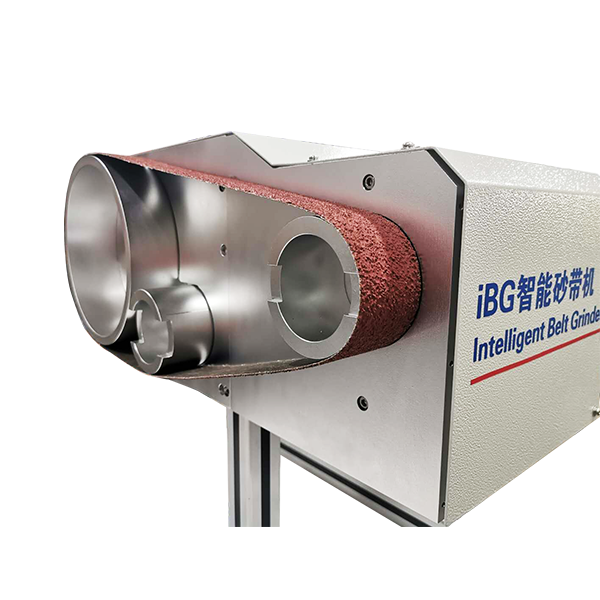
Auto Belt Changer
Trwy'r dyluniad strwythurol arbennig, gellir disodli'r gwregys sgraffiniol yn awtomatig.Un sander gwregys ar gyfer prosesau lluosog.
Digollediad Disgyrchiant
Gall y robot sicrhau pwysau malu cyson wrth falu mewn unrhyw ystum.
Iawndal Tensiwn Belt
Mae'r pwysau malu yn cael ei reoli gan yr iGrinder, ac nid yw tensiwn y gwregys yn effeithio ar y grym malu.
Canfod Swm Malu
Synhwyrydd dadleoli integredig a all ganfod swm malu yn awtomatig.
iBG01 Peiriant Gwregys Bach a Reolir gan Llu Deallus
| Pwysau | Ystod Grym | Cywirdeb | Ystod arnawf | Dadleoli Mesur Cywirdeb | Gallu malu gwregys |
| 26kg | 0 – 200N | +/-1N | 0-25mm | 0.01mm | 2 - 3kg deunydd dur di-staen |