

"أنا أتطلع لشراء خلية تحميل 6 DOF وقد أعجبت بخيارات Sunrise المنخفضة.---- خبير أبحاث إعادة التأهيل

مصدر الصورة: مختبر علم الأعصاب بجامعة ميشيغان
مع صعود الذكاء الاصطناعي ، حقق الباحثون في أمريكا الشمالية وأوروبا تقدمًا مثيرًا للإعجاب في البحث والتطوير في مجال إعادة التأهيل الطبي.من بينها ، جذبت الأطراف الاصطناعية الذكية (الروبوتات الاصطناعية) الكثير من الاهتمام.تعد وحدة التحكم في القوة أحد المكونات الرئيسية للأطراف الاصطناعية التي تعمل بالذكاء الاصطناعي.يدعم الطرف الاصطناعي التقليدي المستخدم بطريقة ثابتة ، لذلك غالبًا ما تحتاج الأطراف وأجزاء الجسم الأخرى للمستخدم إلى التعاون مع الطرف الاصطناعي الصلب لإكمال الإجراء.ليس فقط القدرة على التحرك محدودة ، ولكن الحركة أيضًا غير متناسقة.من السهل السقوط وتطوير المضاعفات الثانوية ، مما يخلق المزيد من الصعوبات والتحديات للمرضى.بخلاف الأطراف الصناعية التقليدية ، يمكن للأطراف الاصطناعية الروبوتية أن توفر للمستخدمين دعمًا نشطًا وليس سلبيًا للتوازن وفقًا لتغيرات ظروف الطريق وحركاته ، مما يسمح لهم بالتصرف بحرية أكبر وتحسين نوعية حياتهم بشكل كبير.

مصدر الصورة: التصميم والتنفيذ السريري لساق آلية مفتوحة المصدر ، أليخاندرو إف أزوكار.حجم طبيعة الهندسة الطبية الحيوية.
وفقًا للإحصاءات ، يوجد ما لا يقل عن 300 ألف مبتور في الولايات المتحدة.في الصين ، يوجد 24.12 مليون شخص معاق جسديًا ، منهم 2.26 مليون مبتور الأطراف ، و 39.8٪ فقط تم تركيبهم بأطراف صناعية.تظهر الإحصاءات في العامين الماضيين أن متوسط العدد السنوي لعمليات بتر الأعضاء الجديدة في الصين يبلغ حوالي 200 ألف بسبب حوادث المرور والحوادث الصناعية وحوادث التعدين والأمراض.يتزايد عدد حالات البتر بسبب مرض السكري بشكل سريع.يجب أيضًا استبدال الأطراف الاصطناعية مع تقدم العمر.بالإضافة إلى ذلك ، يحتاج المرضى الذين يعانون من ضعف العضلات أو ضمور العضلات أو شلل نصفي أيضًا إلى مساعدات طبية مثل الهياكل الخارجية لمساعدتهم على الوقوف أو الحركة مرة أخرى.لذلك ، فإن الأطراف الصناعية الذكية والهياكل الخارجية الذكية الأكثر كفاءة وموثوقية لها طلب كبير في السوق وأهمية اجتماعية.
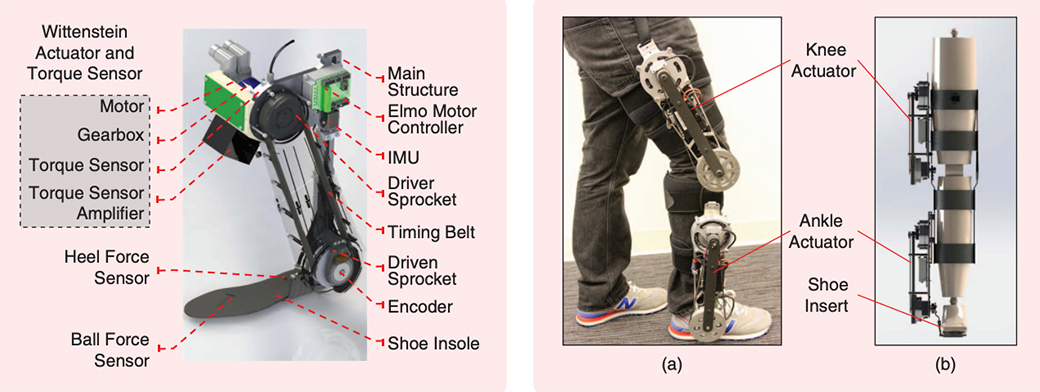
مصدر الصورة: مختبر أنظمة التحكم الحركية يوتا دالاس
لتحقيق التحكم في القوة للأطراف الاصطناعية الذكية ، هناك حاجة إلى 6 مستشعرات قوة DOF لاستشعار التغيرات في ظروف الطريق في الوقت الفعلي والتحكم بدقة في حجم القوة.يضع تعقيد ظروف الطريق وتنوع الإجراءات وقيود التكامل متطلبات عالية جدًا على 6 مستشعرات قوة DOF.لا يجب أن تفي بمتطلبات النطاق للقوة واللحظة فحسب ، بل يجب أيضًا أن تكون خفيفة الوزن ورقيقة.قال المستخدمون إنه بعد التحقيق ، وجدوا أنه في السوق ، يمكن فقط لأجهزة استشعار القوة SRI M35 فائقة الرقة 6 DOF تلبية جميع هذه المتطلبات.
تشتمل سلسلة M35 على 18 طرازًا ، يبلغ سمكها أقل من 1 سم ، وأصغرها يبلغ 7.5 مم فقط.جميع الأوزان أقل من 0.26 كجم ، والأخف وزنًا 0.01 كجم فقط.عدم الخطية والتباطؤ هو 1٪ ، والكلام المتبادل أقل من 3٪ ، وقد تم بناؤه باستخدام تقنية قياس إجهاد الرقائق المعدنية.يمكن تحقيق الأداء الممتاز لهذه المستشعرات الرفيعة والخفيفة والمضغوطة بسبب 30 عامًا من الخبرة في تصميم SRI ، والتي نشأت من دمية تحطم سلامة السيارات والتوسع إلى أبعد من ذلك.تُستخدم هذه التقنيات الآن في البحث والتطوير للأطراف الصناعية الذكية لمرافقة سلامة المزيد من الأشخاص.
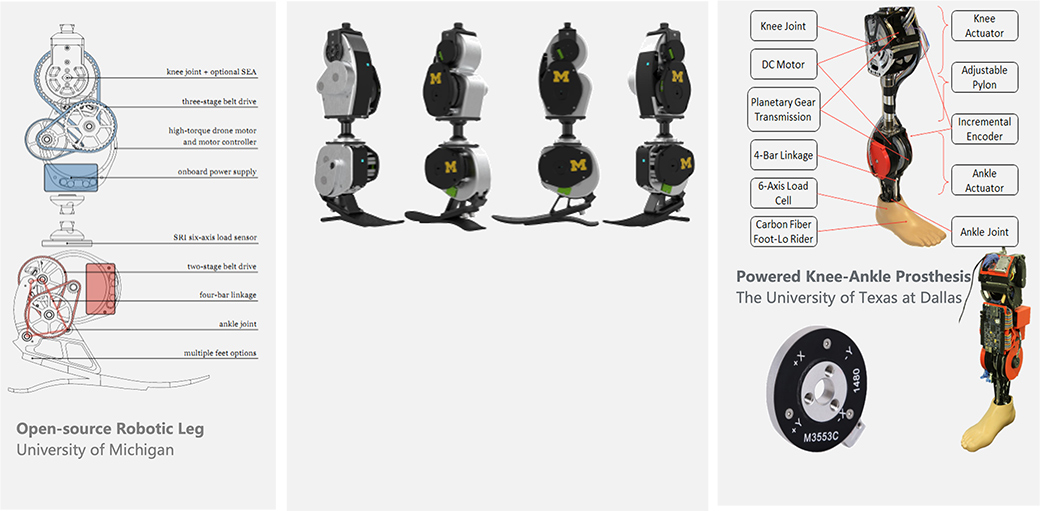
مصدر الصورة: مختبر علم الأعصاب بجامعة ميتشيغان ، مختبر أنظمة التحكم الحركي
إلى جانب ذلك ، فإن سعر مستشعرات SRI تنافسي للغاية مقارنة مع أسعار الشركات المصنعة لأجهزة استشعار القوة الرئيسية الأخرى.بفضل قوتها التقنية القوية وأسعارها المعقولة ، انتشرت العلامة التجارية SRI ذات المستوى المنخفض عن طريق الكلام الشفهي وهي محبوبة بشدة من قبل أفضل مختبرات أبحاث إعادة التأهيل الطبي وصناعة الأطراف الاصطناعية.في السنوات السبع الماضية ، استخدم باحثون ومهندسون في علم الإلكترونيات والميكانيكا الحيوية من الولايات المتحدة والصين وكندا واليابان وإيطاليا وإسبانيا ودول أخرى مستشعرات SRI فائقة الرقة لإجراء أبحاث مبتكرة ونشروا عددًا كبيرًا من الأوراق الأكاديمية وحققوا نجاحًا ملحوظًا. تقدم.
في المقالة التالية ، سوف نقدم تطبيق SRI M35 شديد الرقة في مجال إعادة التأهيل الطبي.بما في ذلك أحدث نتائج الأبحاث الخاصة بالأطراف الصناعية الذكية والهياكل الخارجية الذكية المنشورة في دوريات مؤتمرات Nature و IEEE.ابقوا متابعين!
المرجعي:
1. عدد المرضى وتقديرات أخرى للأطراف الاصطناعية وتقويم العظام في الولايات المتحدة الأمريكية ، موريس أ.لوبلانك ، MS ، CP
2. التصميم والتنفيذ السريري لساق آلية مفتوحة المصدر ، أليخاندرو إف أزوكار.حجم طبيعة الهندسة الطبية الحيوية.
3. تصميم والتحقق من جبيرة الركبة والكاحل بكثافة عزم الدوران والقابلة للدفع الخلفي.Hanqi Zhu ، مؤتمر IEEE الدولي لعام 2017 حول الروبوتات والأتمتة (ICRA)